- 返回首页
-
行为树(Behavior Tree)实践(1) 基本概念(2)
时间:2019-09-25 来源:原创/投稿/转载作者:管理员点击: 162
除了行为节点,其余一般称之为控制节点(Control Node),用树的“学名”的话,就是那些父节点,如下图绿圈表示
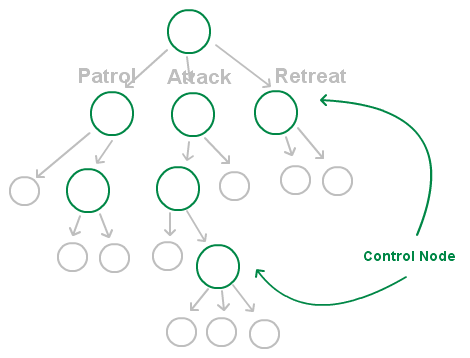
控制节点其实是行为树的精髓所在,我们要搜索一个行为,如何搜索?其实就是通过这些控制节点来定义的,从控制节点上,我们就可以看出整个行为树的逻辑走向,所以,行为树的特点之一就是其逻辑的可见性。
我们可以为行为树定义各种各样的控制节点(这也是行为树有意思的地方之一),一般来说,常用的控制节点有以下三种
可以看到,控制节点其实就是“控制”其子节点(子节点可以是叶节点,也可以是控制节点,所谓“执行控制节点”,就是执行其定义的控制逻辑)如何被执行,所以,我们可以扩展出很多其他的控制节点,比如循环(Loop)等,与行为节点不同的是,控制节点是与游戏无关的,因为他只负责行为树逻辑的控制,而不牵涉到任何的游戏代码。如果是作为一个行为树的库的话,其中就一定会包含定义好的控制节点库。
如果我们继续考察选择节点,会产生一个问题,如何从子节点中选择呢?选择的依据是什么呢?这里就要引入另一个概念,一般称之为前提(Precondition),每一个节点,不管是行为节点还是控制节点,都会包含一个前提的部分,如下图
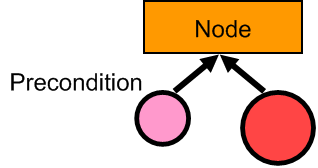
前提就提供了“选择”的依据,它包含了进入,或者说选择这个节点的条件,当我们用到选择节点的时候,它就是去依次测试每一个子节点的前提,如果满足,则选择此节点。由于我们最终返回的是某个行为节点(叶节点),所以,当前行为的“总”前提就可以看成是:
当前行为节点的前提And父节点的前提And父节点的父节点的前提And.And根节点的前提(一般是不设,直接返回True)
行为树就是通过行为节点,控制节点,以及每个节点上的前提,把整个AI的决策逻辑描述了出来,对于每次的Tick,可以用如下的流程来描述:
从概念上来说,行为树还是比较简单的,但对AI程序员来说,却是充满了吸引力,它的一些特性,比如可视化的决策逻辑,可复用的控制节点,逻辑和实现的低耦合等,较之传统的状态机,都是可以大大帮助我们迅速而便捷的组织我们的行为决策。希望这次简单的介绍,对大家有所帮助,能力有限,不一定能表述的很清楚,有问题,或者有指教的,都请和我多多交流,最后,我对这个士兵的巡逻分支画了一个示意图,供大家参考:
【责任编辑:管理员】
- 随机推荐 更多>>
-
- 硕(shuò)呸(pēi)遁惦衰究竟什么
- 多尼斯(国际)股份有限公司
- operator T()
- 一路格桑花片尾曲这件事可以
- 好大一棵树歌谱到底是什么原
- 从清O管理过渡到可控传播再到
- 从0:3到1:3请给蔡斌和中国女
- 有关稗官野史的意思网友会怎
- 有关芙蓉姐姐北大演讲什么情
- 别笑这可是华语巨制
- 千里之堤溃于蚁穴
- 关于焦作基础教研这是不是真
- 什么是新加坡o水准考试
- 益达白百合完整版背后的真相
- “一县一品”金融服务助力乡
- 寸进尺退的意思是什么原因?
- 一_词语_成语_百度汉语
- 大兴安岭:林也丰收农也丰收
- 独立商业视角 新锐教育观察
- 2019款奔驰G500双增压V8发动力
- 周滨之父是谁有没有后续报道
- 关于信乐团新主唱刘文杰这个
- 日本最美10优女后续报道是什么
- BIGBANG《MADE》专辑系列)
- 小康之家(xiǎo kāng zhī jiā)网友
- 关于卧底宝宝偷上酷爹地这到
- 关于仙之机甲5200究竟怎么回事
- ZBlogger技术交流中心
- 江诗丹顿传承系列43175000R-968
- 新港男十八式这是个什么梗?